
Nejlepší bude si rozebrat uvedený program na jednotlivé části. Jedna část se stará o získání dat z kinectu, pro tuto úlohu máme vytvořeno samostatné vlákno, které je voláno jako funkce freenect_threadfunc.
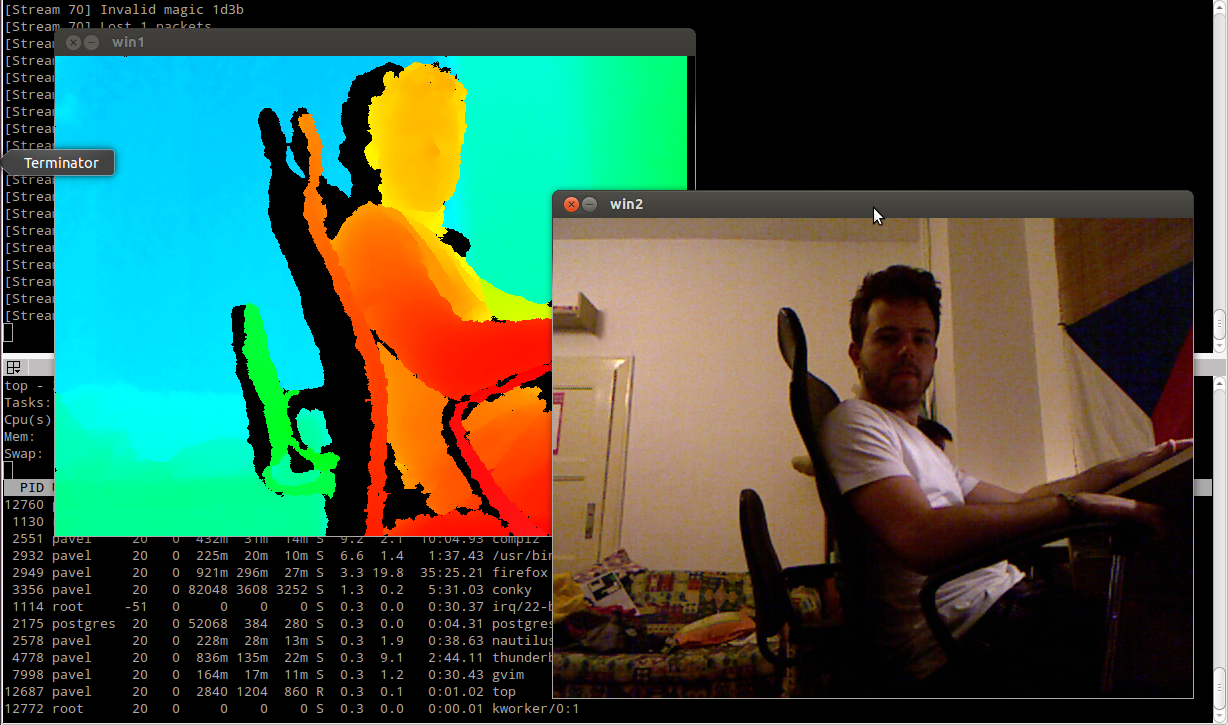
Nejdůležitěší je získávání a zpracování dat z kinectu. Z kinectu můžeme získat hloubkovou mapu a snímky z kamery. Hloubková mapa je reprezentována obrazovou maticí, na výběr je použití buď černobílého nebo barevného - funkce depth_cb (barevná) a depth_wb (černobílá). Rozlišení kinectu je 640x480px a hloupková mapa nese informaci o o hloupce 11bitami, což činí hodnoty od 0-2047 (vhodné právě pro barevnou reprezentaci).
Zajímavé je pak odcyhtávání událostí, to nám umožní ovládání motorku kinectu pomocí kláves w,s,x. K tomu slouží funkce keyPressed, kde najdeme i možnosti nastavení barev pro led diodu.
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <libfreenect.h>
#include <pthread.h>
#include <cv.h>
#include <highgui.h>
#include <math.h>
pthread_t freenect_thread;
volatile int die = 0;
pthread_mutex_t gl_backbuf_mutex = PTHREAD_MUTEX_INITIALIZER;
uint8_t *depth_mid, *depth_front;
uint8_t *rgb_back, *rgb_mid, *rgb_front;
freenect_context *f_ctx;
freenect_device *f_dev;
int freenect_angle = 0;
int freenect_led;
freenect_video_format requested_format = FREENECT_VIDEO_RGB;
freenect_video_format current_format = FREENECT_VIDEO_RGB;
pthread_cond_t gl_frame_cond = PTHREAD_COND_INITIALIZER;
int got_rgb = 0;
int got_depth = 0;
void keyPressed(unsigned char key)
{
if (key == 27) {
die = 1;
pthread_join(freenect_thread, NULL);
free(depth_mid);
free(depth_front);
free(rgb_back);
free(rgb_mid);
free(rgb_front);
// Not pthread_exit because OSX leaves a thread lying around and doesn't exit
exit(0);
}
if (key == 'w') {
freenect_angle++;
if (freenect_angle > 30) {
freenect_angle = 30;
}
}
if (key == 's') {
freenect_angle = 0;
}
if (key == 'f') {
if (requested_format == FREENECT_VIDEO_IR_8BIT)
requested_format = FREENECT_VIDEO_RGB;
else if (requested_format == FREENECT_VIDEO_RGB)
requested_format = FREENECT_VIDEO_YUV_RGB;
else
requested_format = FREENECT_VIDEO_IR_8BIT;
}
if (key == 'x') {
freenect_angle--;
if (freenect_angle < -30) {
freenect_angle = -30;
}
}
if (key == '1') {
freenect_set_led(f_dev,LED_GREEN);
}
if (key == '2') {
freenect_set_led(f_dev,LED_RED);
}
if (key == '3') {
freenect_set_led(f_dev,LED_YELLOW);
}
// 5 is the same as 4
if (key == '4' || key == '5') {
freenect_set_led(f_dev,LED_BLINK_GREEN);
}
if (key == '6') {
freenect_set_led(f_dev,LED_BLINK_RED_YELLOW);
}
if (key == '0') {
freenect_set_led(f_dev,LED_OFF);
}
freenect_set_tilt_degs(f_dev,freenect_angle);
}
uint16_t t_gamma[2048];
void depth_wb(freenect_device *dev, void *v_depth, uint32_t timestamp){
int i;
uint16_t *depth = (uint16_t*)v_depth;
pthread_mutex_lock(&gl_backbuf_mutex);
for (i=0; i<640*480; i++) {
//int pval = t_gamma[depth[i]]/8;
int pval = 255 - depth[i]/8;
depth_mid[3*i+0] = pval;
depth_mid[3*i+1] = pval;
depth_mid[3*i+2] = pval;
}
got_depth++;
pthread_cond_signal(&gl_frame_cond);
pthread_mutex_unlock(&gl_backbuf_mutex);
}
void depth_cb(freenect_device *dev, void *v_depth, uint32_t timestamp)
{
int i;
uint16_t *depth = (uint16_t*)v_depth;
pthread_mutex_lock(&gl_backbuf_mutex);
for (i=0; i<640*480; i++) {
int pval = t_gamma[depth[i]];
int lb = pval & 0xff;
switch (pval>>8) {
case 0:
depth_mid[3*i+0] = 255;
depth_mid[3*i+1] = 255-lb;
depth_mid[3*i+2] = 255-lb;
break;
case 1:
depth_mid[3*i+0] = 255;
depth_mid[3*i+1] = lb;
depth_mid[3*i+2] = 0;
break;
case 2:
depth_mid[3*i+0] = 255-lb;
depth_mid[3*i+1] = 255;
depth_mid[3*i+2] = 0;
break;
case 3:
depth_mid[3*i+0] = 0;
depth_mid[3*i+1] = 255;
depth_mid[3*i+2] = lb;
break;
case 4:
depth_mid[3*i+0] = 0;
depth_mid[3*i+1] = 255-lb;
depth_mid[3*i+2] = 255;
break;
case 5:
depth_mid[3*i+0] = 0;
depth_mid[3*i+1] = 0;
depth_mid[3*i+2] = 255-lb;
break;
default:
depth_mid[3*i+0] = 0;
depth_mid[3*i+1] = 0;
depth_mid[3*i+2] = 0;
break;
}
}
got_depth++;
pthread_cond_signal(&gl_frame_cond);
pthread_mutex_unlock(&gl_backbuf_mutex);
}
void rgb_cb(freenect_device *dev, void *rgb, uint32_t timestamp)
{
pthread_mutex_lock(&gl_backbuf_mutex);
// swap buffers
assert (rgb_back == rgb);
rgb_back = rgb_mid;
freenect_set_video_buffer(dev, rgb_back);
rgb_mid = (uint8_t*)rgb;
got_rgb++;
pthread_cond_signal(&gl_frame_cond);
pthread_mutex_unlock(&gl_backbuf_mutex);
}
void *freenect_threadfunc(void *arg)
{
int accelCount = 0;
freenect_set_tilt_degs(f_dev,freenect_angle);
freenect_set_led(f_dev,LED_RED);
freenect_set_depth_callback(f_dev, depth_wb);
freenect_set_video_callback(f_dev, rgb_cb);
freenect_set_video_mode(f_dev, freenect_find_video_mode(FREENECT_RESOLUTION_MEDIUM, current_format));
freenect_set_depth_mode(f_dev, freenect_find_depth_mode(FREENECT_RESOLUTION_MEDIUM, FREENECT_DEPTH_11BIT));
freenect_set_video_buffer(f_dev, rgb_back);
freenect_start_depth(f_dev);
freenect_start_video(f_dev);
//printf("'w'-tilt up, 's'-level, 'x'-tilt down, '0'-'6'-select LED mode, 'f'-video format\n");
while (!die && freenect_process_events(f_ctx) >= 0) {
//Throttle the text output
if (accelCount++ >= 2000)
{
accelCount = 0;
freenect_raw_tilt_state* state;
freenect_update_tilt_state(f_dev);
state = freenect_get_tilt_state(f_dev);
double dx,dy,dz;
freenect_get_mks_accel(state, &dx, &dy, &dz);
//printf("\r raw acceleration: %4d %4d %4d mks acceleration: %4f %4f %4f", state->accelerometer_x, state->accelerometer_y, state->accelerometer_z, dx, dy, dz);
fflush(stdout);
}
if (requested_format != current_format) {
freenect_stop_video(f_dev);
freenect_set_video_mode(f_dev, freenect_find_video_mode(FREENECT_RESOLUTION_MEDIUM, requested_format));
freenect_start_video(f_dev);
current_format = requested_format;
}
}
//printf("\nshutting down streams...\n");
freenect_stop_depth(f_dev);
freenect_stop_video(f_dev);
freenect_close_device(f_dev);
freenect_shutdown(f_ctx);
//printf("-- done!\n");
return NULL;
}
int cv_freenect_iplimage(IplImage * cam, IplImage * depth){
pthread_mutex_lock(&gl_backbuf_mutex);
// When using YUV_RGB mode, RGB frames only arrive at 15Hz, so we shouldn't force them to draw in lock-step.
// However, this is CPU/GPU intensive when we are receiving frames in lockstep.
if (current_format == FREENECT_VIDEO_YUV_RGB) {
while (!got_depth && !got_rgb) {
pthread_cond_wait(&gl_frame_cond, &gl_backbuf_mutex);
}
} else {
while ((!got_depth || !got_rgb) && requested_format != current_format) {
pthread_cond_wait(&gl_frame_cond, &gl_backbuf_mutex);
}
}
if (requested_format != current_format) {
pthread_mutex_unlock(&gl_backbuf_mutex);
return 2;
}
uint8_t *tmp;
if (got_depth) {
tmp = depth_front;
depth_front = depth_mid;
depth_mid = tmp;
got_depth = 0;
}
if (got_rgb) {
tmp = rgb_front;
rgb_front = rgb_mid;
rgb_mid = tmp;
got_rgb = 0;
}
pthread_mutex_unlock(&gl_backbuf_mutex);
memcpy(cam->imageData,(char *)rgb_front, cam->width*cam->height*cam->nChannels);
memcpy(depth->imageData,(char *)depth_front, depth->width*depth->height*depth->nChannels);
cvCvtColor(cam,cam,CV_BGR2RGB);
cvCvtColor(depth,depth,CV_BGR2RGB);
return 0;
}
int main(int argc, char **argv)
{
int res;
depth_mid = (uint8_t*)malloc(640*480*3);
depth_front = (uint8_t*)malloc(640*480*3);
rgb_back = (uint8_t*)malloc(640*480*3);
rgb_mid = (uint8_t*)malloc(640*480*3);
rgb_front = (uint8_t*)malloc(640*480*3);
printf("Kinect camera test\n");
int i;
for (i=0; i<2048; i++) {
float v = i/2048.0;
v = powf(v, 3)* 6;
t_gamma[i] = v*6*256;
}
if (freenect_init(&f_ctx, NULL) < 0) {
printf("freenect_init() failed\n");
return 1;
}
freenect_set_log_level(f_ctx, FREENECT_LOG_DEBUG);
freenect_select_subdevices(f_ctx, (freenect_device_flags)(FREENECT_DEVICE_MOTOR | FREENECT_DEVICE_CAMERA));
int nr_devices = freenect_num_devices (f_ctx);
printf ("Number of devices found: %d\n", nr_devices);
int user_device_number = 0;
if (argc > 1)
user_device_number = atoi(argv[1]);
if (nr_devices < 1) {
freenect_shutdown(f_ctx);
return 1;
}
if (freenect_open_device(f_ctx, &f_dev, user_device_number) < 0) {
printf("Could not open device\n");
freenect_shutdown(f_ctx);
return 1;
}
res = pthread_create(&freenect_thread, NULL, freenect_threadfunc, NULL);
if (res) {
printf("pthread_create failed\n");
freenect_shutdown(f_ctx);
return 1;
}
cvNamedWindow("win1", CV_WINDOW_AUTOSIZE);
IplImage * depth = cvCreateImage(cvSize(640,480), IPL_DEPTH_8U, 3);
IplImage * rgb = cvCreateImage(cvSize(640,480), IPL_DEPTH_8U, 3);
int key;
for(;;){
key=cvWaitKey(20);
cv_freenect_iplimage(rgb,depth);
cvShowImage("win1",depth);
cvShowImage("win2",rgb);
keyPressed(key);
if(die) {
break;
}
}
cvDestroyWindow("win1");
return 0;
}
Ještě důležitou částí je Makefile pro překlad. Instalace freenect a opencv naleznete na tomto webu, takže se nebudu tímto zabývat.
CXX = g++
PROG = main
OBJECTS = main.o
LIBS = `pkg-config libfreenect --libs --cflags` `pkg-config opencv --libs --cflags` -lpthread -lm -lusb-1.0
LIBS += `pkg-config opencv --libs --cflags` -lpthread -lm -lusb-1.0
CFLAGS = -O2 -g -Wall -fmessage-length=0
all:$ $(PROG)
$(PROG): $(OBJECTS)
$(CXX) $(CFLAGS) $(OBJECTS) -o $(PROG) $(LIBS)
%.o: src/%.cpp
$(CXX) $(CFLAGS) $(LIBS) -c $<
clean:
rm -rf *.o $(CVPROG)